.")
The Hong Kong University of Science and Technology (Guangzhou)
Hi! I am Zheng LI, a Ph.D. student in Robotics at The Hong Kong University of Science and Technology (Guangzhou), supervised by Prof. Jun MA. Prior to this, I completed my B.Eng. in Automation at Chu Kochen Honors College, Zhejiang University in 2023, and M.Phil. in Robotics and Autonomous Systems at HKUST(GZ) in 2026. In addition to my research, I serve as a reviewer for ICRA, RA-L, and other robotics conferences and journals.
My research interests centers on robot learning, multimodal perception for manipulation, and interpretable representation learning. My work aspires to establish a principled framework that fuses heterogeneous sensory streams (e.g., vision, proprioception, and tactile sensing) through structured attention and semantically consistent alignment, with the ultimate goal of unlocking generalizable intelligence that transcends task-specific engineering and empowers robots to operate robustly in the open world over extended timescales.
Education
-
 The Hong Kong University of Science and Technology (Guangzhou)Upcoming Ph.D. StudentSep. 2026 -
The Hong Kong University of Science and Technology (Guangzhou)Upcoming Ph.D. StudentSep. 2026 - -
The Hong Kong University of Science and Technology (Guangzhou)M.Phil. in Robotics and Autonomous SystemsSep. 2024 - Oct. 2026
-
 Zhejiang UniversityB.Eng. in AutomationSep. 2019 - Jun. 2023
Zhejiang UniversityB.Eng. in AutomationSep. 2019 - Jun. 2023
Experience
-
 Wuji Technology (舞肌科技)Algorithm InternJun. 2026 - Present
Wuji Technology (舞肌科技)Algorithm InternJun. 2026 - Present -
 Institute for AI Industry Research, Tsinghua UniversityResearch InternSep. 2025 - Dec. 2025
Institute for AI Industry Research, Tsinghua UniversityResearch InternSep. 2025 - Dec. 2025 -
 National University of SingaporeGraduate ResearcherAug. 2023 - Aug. 2024
National University of SingaporeGraduate ResearcherAug. 2023 - Aug. 2024 -
 College of William & MarySummer Research InternMar. 2022 - Feb. 2023
College of William & MarySummer Research InternMar. 2022 - Feb. 2023
Honors & Awards
-
3rd prize, IROS 2025 Robot Dancing CompetitionOct. 2025
-
Outstanding Graduates of Zhejiang UniversityJun. 2023
-
Certificate of Chu Kochen Honors ProgramJun. 2023
News
Selected Publications (view all )
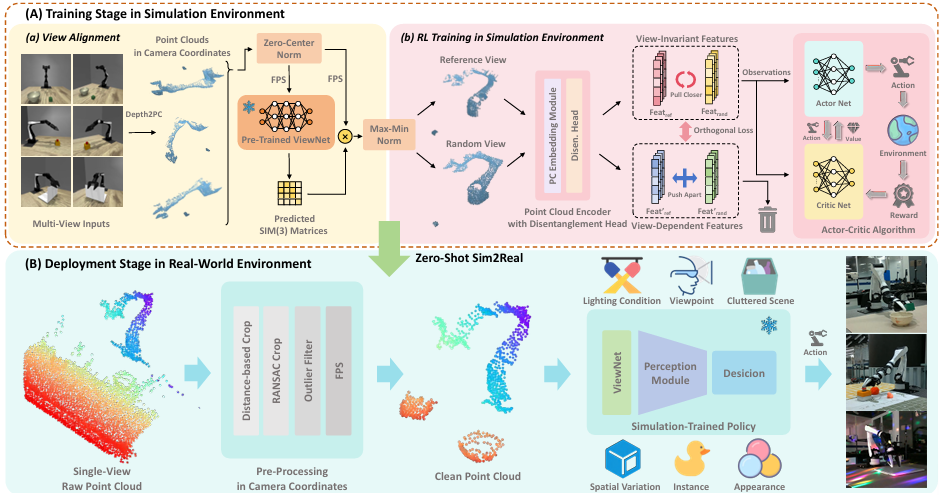
ManiVID-3D: Generalizable View-Invariant Reinforcement Learning for Robotic Manipulation via Disentangled 3D Representations
Zheng Li*, Pei Qu*, Yufei Jia*, Shihui Zhou, Haizhou Ge, Jiahang Cao, Jinni Zhou, Guyue Zhou, Jun Ma (* equal contribution)
IEEE Robotics and Automation Letters (RA-L) 2026
ManiVID-3D: Generalizable View-Invariant Reinforcement Learning for Robotic Manipulation via Disentangled 3D Representations
Zheng Li*, Pei Qu*, Yufei Jia*, Shihui Zhou, Haizhou Ge, Jiahang Cao, Jinni Zhou, Guyue Zhou, Jun Ma (* equal contribution)
IEEE Robotics and Automation Letters (RA-L) 2026
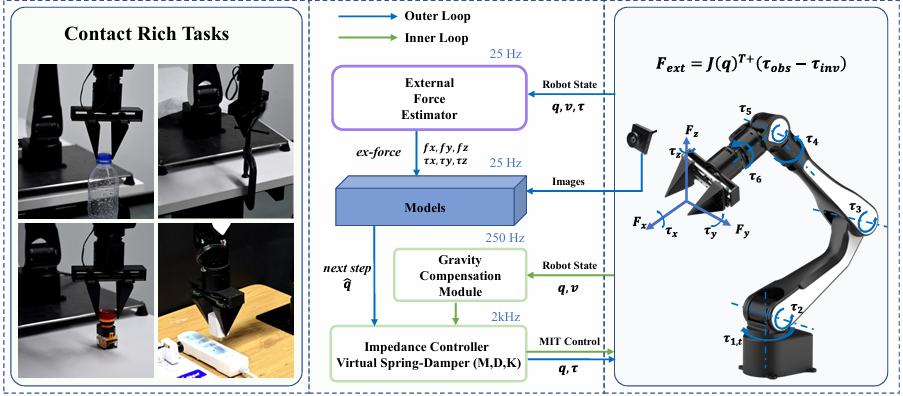
FILIC: Dual-Loop Force-Guided Imitation Learning with Impedance Torque Control for Contact-Rich Manipulation Tasks
Haizhou Ge*, Yufei Jia*, Zheng Li*, Yue Li*, Zhixing Chen*, Ruqi Huang, Guyue Zhou (* equal contribution)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2026
FILIC: Dual-Loop Force-Guided Imitation Learning with Impedance Torque Control for Contact-Rich Manipulation Tasks
Haizhou Ge*, Yufei Jia*, Zheng Li*, Yue Li*, Zhixing Chen*, Ruqi Huang, Guyue Zhou (* equal contribution)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2026