2026
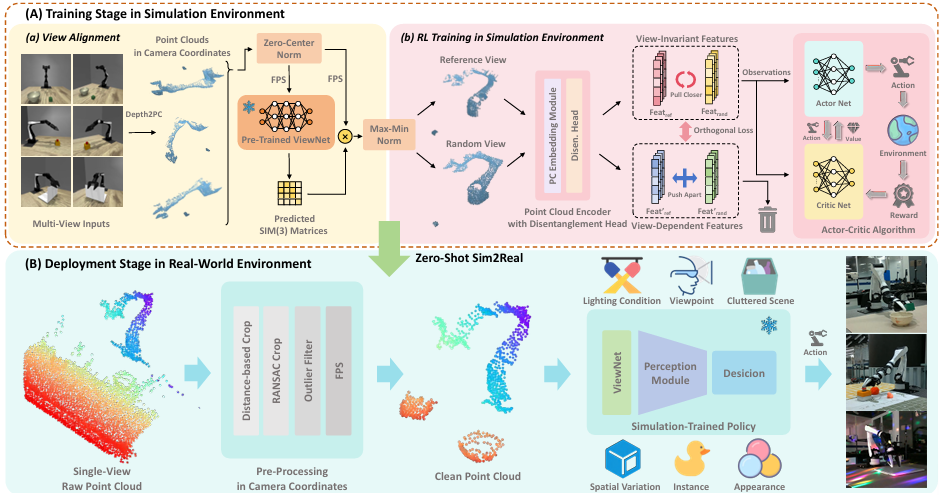
ManiVID-3D: Generalizable View-Invariant Reinforcement Learning for Robotic Manipulation via Disentangled 3D Representations
Zheng Li*, Pei Qu*, Yufei Jia*, Shihui Zhou, Haizhou Ge, Jiahang Cao, Jinni Zhou, Guyue Zhou, Jun Ma (* equal contribution)
IEEE Robotics and Automation Letters (RA-L) 2026
ManiVID-3D: Generalizable View-Invariant Reinforcement Learning for Robotic Manipulation via Disentangled 3D Representations
Zheng Li*, Pei Qu*, Yufei Jia*, Shihui Zhou, Haizhou Ge, Jiahang Cao, Jinni Zhou, Guyue Zhou, Jun Ma (* equal contribution)
IEEE Robotics and Automation Letters (RA-L) 2026
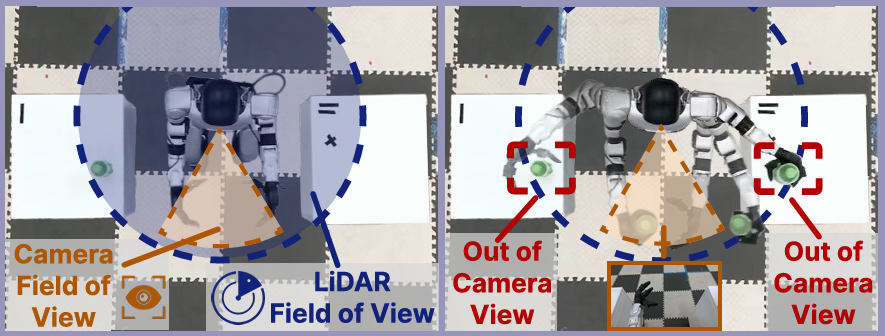
OmniDP: Beyond-FOV Large-Workspace Humanoid Manipulation with Omnidirectional 3D Perception
Pei Qu*, Zheng Li*, Yufei Jia, Ziyun Liu, Liang Zhu, Haoang Li, Jinni Zhou, Jun Ma (* equal contribution)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2026
OmniDP: Beyond-FOV Large-Workspace Humanoid Manipulation with Omnidirectional 3D Perception
Pei Qu*, Zheng Li*, Yufei Jia, Ziyun Liu, Liang Zhu, Haoang Li, Jinni Zhou, Jun Ma (* equal contribution)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2026
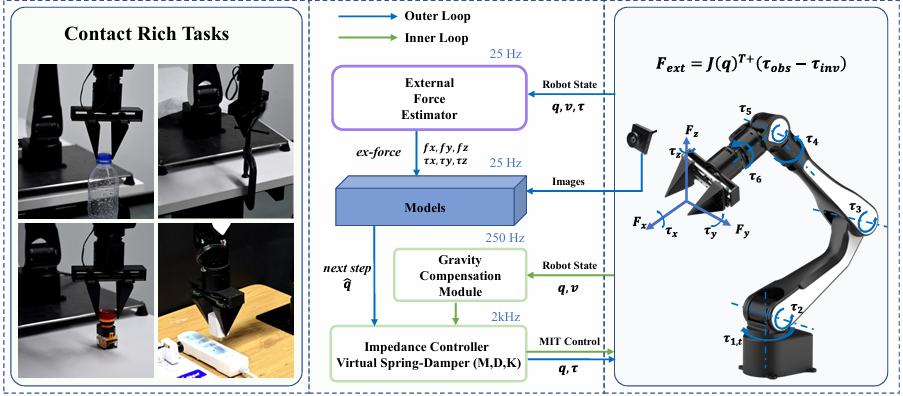
FILIC: Dual-Loop Force-Guided Imitation Learning with Impedance Torque Control for Contact-Rich Manipulation Tasks
Haizou Ge*, Yufei Jia*, Zheng Li*, Yue Li*, Zhixing Chen*, Ruqi Huang, Guyue Zhou (* equal contribution)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2026
FILIC: Dual-Loop Force-Guided Imitation Learning with Impedance Torque Control for Contact-Rich Manipulation Tasks
Haizou Ge*, Yufei Jia*, Zheng Li*, Yue Li*, Zhixing Chen*, Ruqi Huang, Guyue Zhou (* equal contribution)
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2026

GS-Playground: A High-Throughput Photorealistic Simulator for Vision-Informed Robot Learning
Yufei Jia, Heng Zhang, Ziheng Zhang, Junzhe Wu, Mingrui Yu, Zifan Wang, Dixuan Jiang, Zheng Li, et al.
Robotics: Science and Systems (RSS) 2026
GS-Playground: A High-Throughput Photorealistic Simulator for Vision-Informed Robot Learning
Yufei Jia, Heng Zhang, Ziheng Zhang, Junzhe Wu, Mingrui Yu, Zifan Wang, Dixuan Jiang, Zheng Li, et al.
Robotics: Science and Systems (RSS) 2026
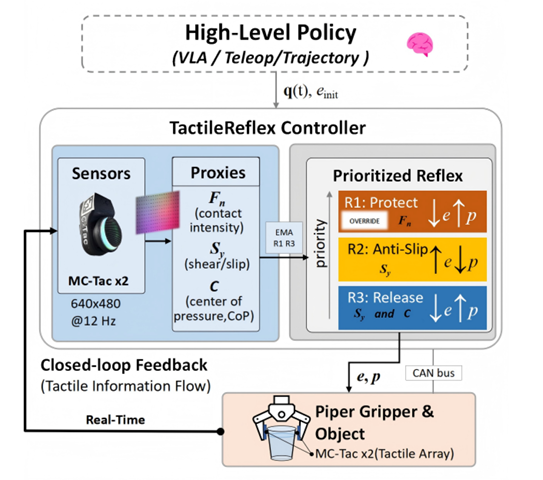
TactileReflex: Noise-Statistics-Driven Vision-Tactile Reflex Control for Force-Sensitive Manipulation
Ziyan Feng, Yulong Fu, Zheng Li, Yuxin He, Jieji Ren, Lujia Wang, Jinni Zhou, Yudong Zhong, Qiang Nie
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2026
TactileReflex: Noise-Statistics-Driven Vision-Tactile Reflex Control for Force-Sensitive Manipulation
Ziyan Feng, Yulong Fu, Zheng Li, Yuxin He, Jieji Ren, Lujia Wang, Jinni Zhou, Yudong Zhong, Qiang Nie
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2026

UniLab: A Heterogeneous Architecture for Robot RL Beyond GPU-Dominant Paradigms
Yufei Jia, Zhanxiang Cao, Mingrui Yu, Heng Zhang, Shenyu Chen, Dixuan Jiang, Meng Li, Xiaofan Li, Yiyang Liu, Junzhe Wu, Zheng Li, et al.
Submitted to Conference on Robot Learning (CoRL) 2026
UniLab: A Heterogeneous Architecture for Robot RL Beyond GPU-Dominant Paradigms
Yufei Jia, Zhanxiang Cao, Mingrui Yu, Heng Zhang, Shenyu Chen, Dixuan Jiang, Meng Li, Xiaofan Li, Yiyang Liu, Junzhe Wu, Zheng Li, et al.
Submitted to Conference on Robot Learning (CoRL) 2026